We received a more final design consensus from the design team.
Almost all subsystem and command classes have been created to allow for driver control. This includes: Drivetrain, Elevator, Feeder, Grabber, CargoExtender, and Hatch.
This upcoming week we hope to test our code on an assembled drivetrain.
Image Recognition
We have made significant progress in testing IR light instead of green visible light reflecting off the retroreflective tape.
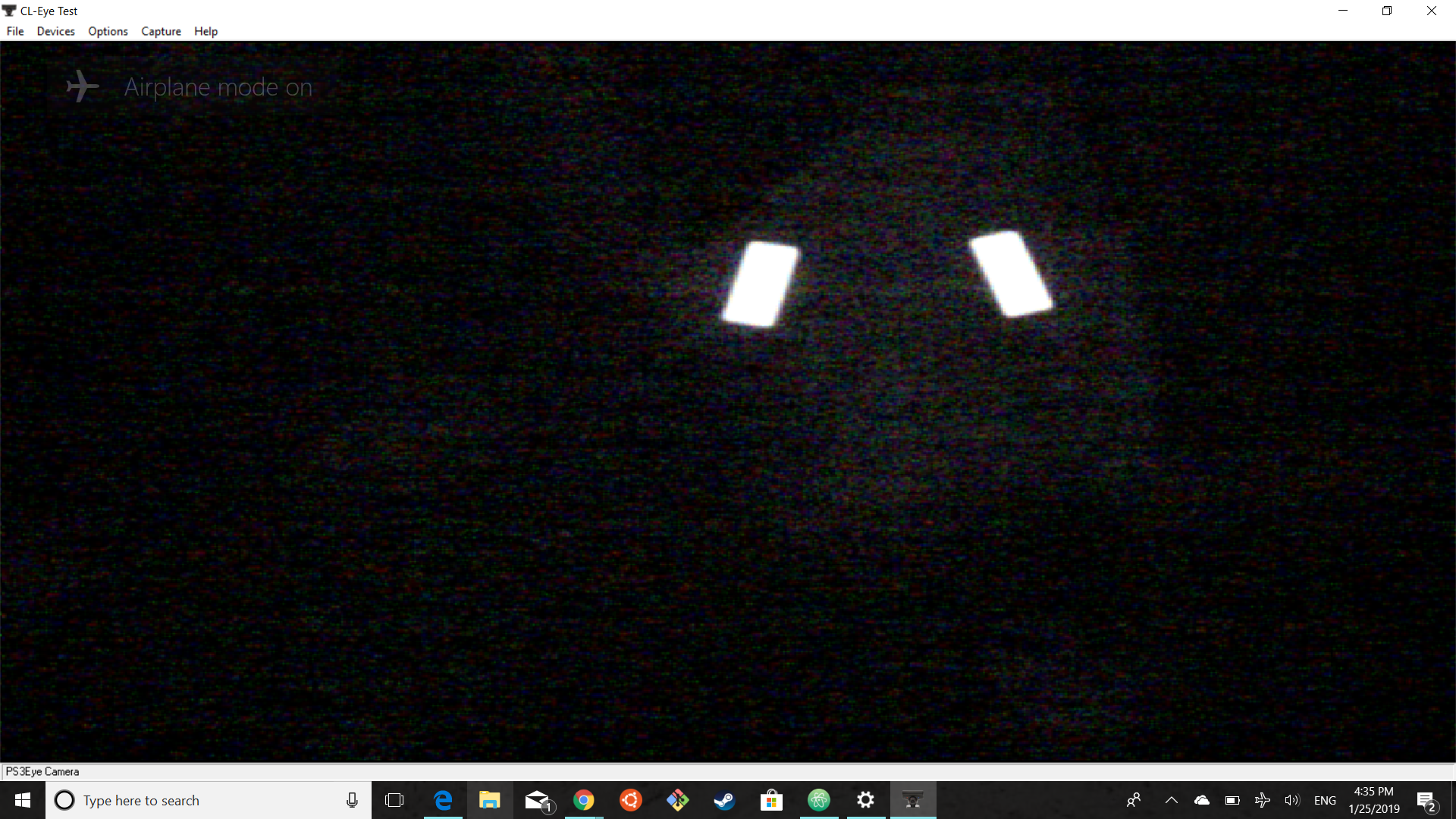
We are using a camera IR filter lens in front of a PlayStation Eye camera, which we chose for its cost and higher IR sensitivity than most cameras
IR LED ring shown through IR filter
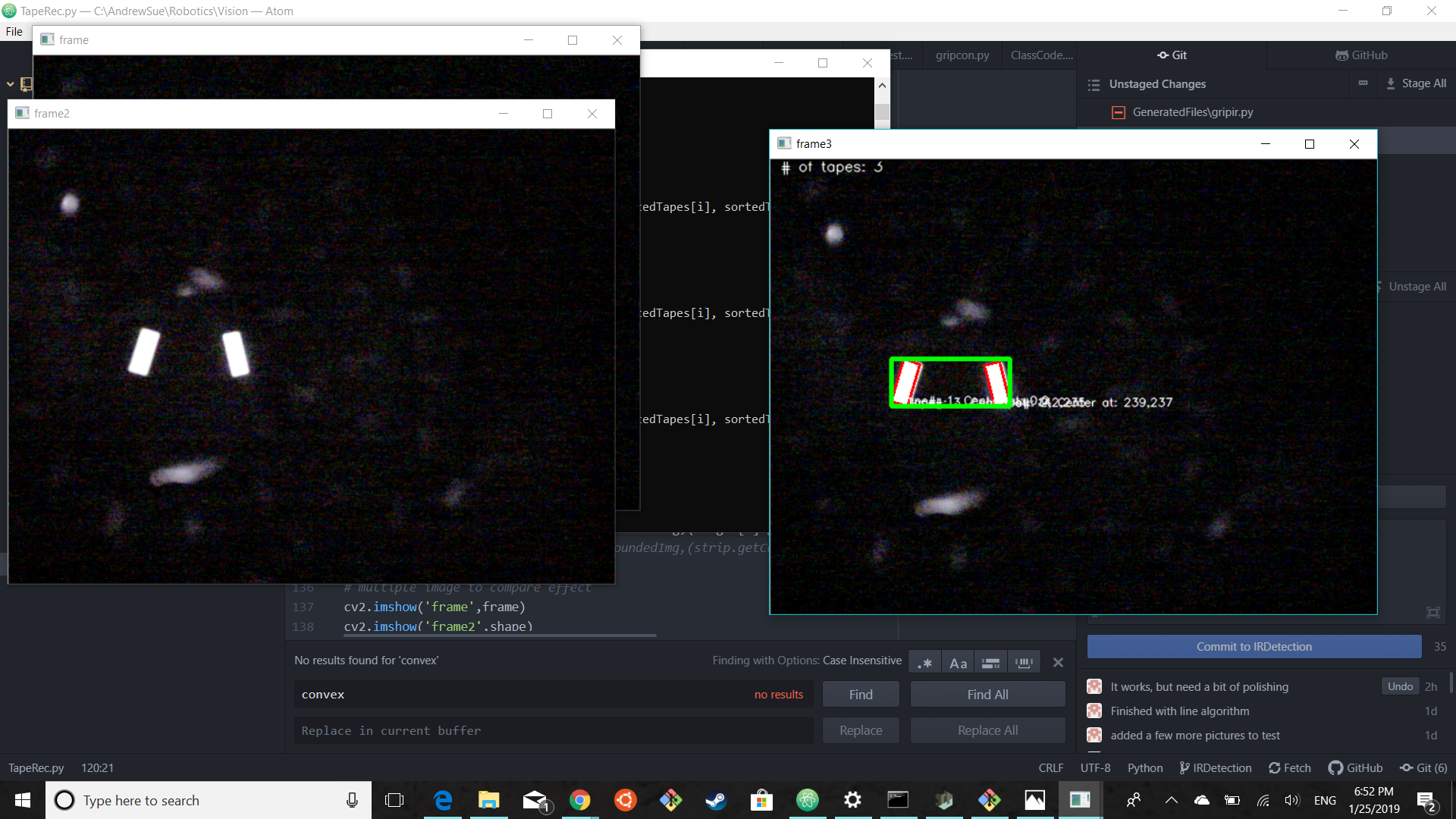
Using generated code from GRIP and employing vision techniques, we were able to detect whether two pieces of tape were to be grouped together or not, drawing a bounding box around them.
Our next steps are to test edge cases where more than 2 tape are visible and when the camera is at an angle from the tape