2020 Build Season Weeks 1 to 4
Week 1
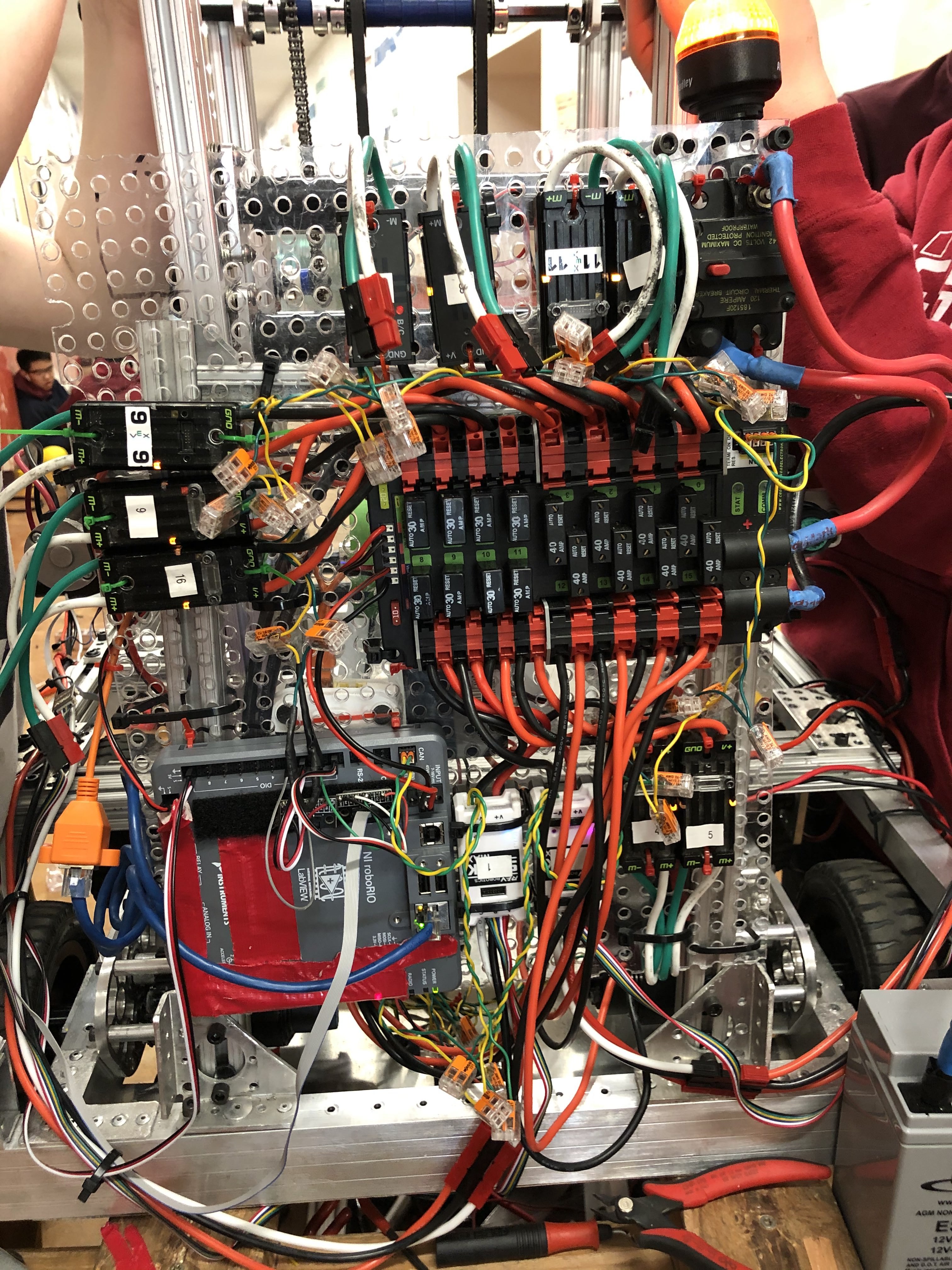
On Monday, we finished the electronics board for our mock drivetrain. On Thursday, held a planning meeting with a software mentor and drove our mock drivetrain!
On Friday, we started laying out electronics for the final robot and flashed our Limelight.
Week 2
I was out sick all of the second week, but we still made a ton of progress.
Early in the second week, we got our order of 6 Falcon 500s. We flashed them and did some initial testing with the built in limit switch connectors. We also did some preliminary testing with the Limelight.
On Friday, we finished up the electronics board and drove our final drivetrain.
Week 3
On Monday, we temporarily mounted the Limelight on the drivetrain and used it to drive towards vision targets. In our final design, the Limelight will be mounted on the turret, but this testing helped us to get some experience working with the parameters.
Throughout the latter half of the week, we moved the electronics board from being flat on the bellypan to be upright in the back of the robot to increase accessibility because there will be belts running along the bellypan to feed the ball from the intake to the shooter.
On Saturday we tested the shooter.
Week 4
On Tuesday, we tested the Limelight on the turret and tested the feeder and shooter in conjunction.
On Friday, we received our order of NEO 550s and Spark Maxes and worked on crimping Anderson connectors onto them. We also soldered breakout modules for our encoders and worked on making extensions for motor wires.
On Saturday, we switched around our electronics configuration (again) to accommodate for switching the shooter from NEOs to 775pros.