2020 Build Season Week 5
On Monday, we practiced controlling the position of our intake arm and tested it in conjunction with our intake.
On Tuesday, we had a planning meeting with our software mentor, Aaron. We laid out the sensors for and what we want each subsystem to able to do.
These are the notes:
Drivetrain
- 2 Encoders, 1 Gyroscope
- Driver Control
- Flip orientation
- Set Velocity and Rotation
- Soften Drivetrain Movements
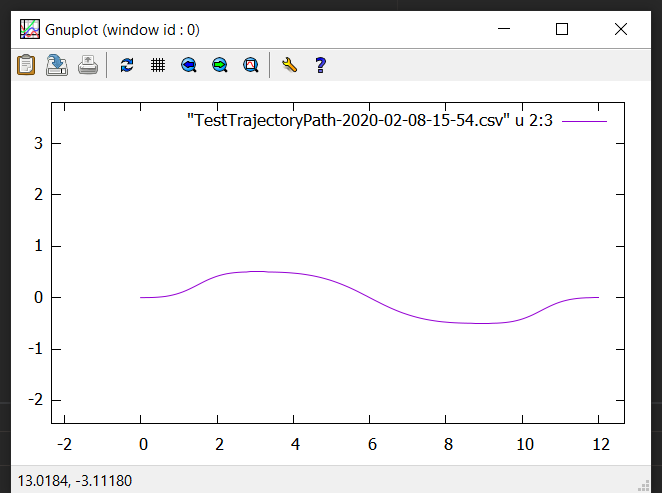
- Today: Test Jaci’s Pathfinder (Pathfinding algorithm)
- Characterization (Calibrating the Drivetrain)
- Testing Pathfinding (Drivetrain follows paths)
Arm
- 1 Limit switch, 1 encoder
- Control its Position
- Zeroing
- Setting Position
Feeder
- Space balls out (need to check/count balls)
- check for dip in rpm?
- beam break sensors?
- Wait for RPM to recover before feeding
Turret
- Measure rotation of turret with Encoder, Limelight
- Zeroing
- Track vision target
- Interface with limelight
- tune for parameters
- Lock position (Hold specific angle relative to Drivetrain)
- Manual Override
Shooter
- Measure rpm with Encoder
- Empirically find distances
- Find distance to Target (using limelight)
On Friday, we briefly visited Lincoln’s Horse Power and practiced using the Limelight to find distance to a vision target.
On Saturday, we tested path following with our drivetrain.
Throughout next week, a semi-finalized version of the robot is going to be completed and we can put together all the different programming testing that we’ve done so that we can hopefully get some practice at Paly Robotics’ week 6 scrimmage.